
Mobile Robots
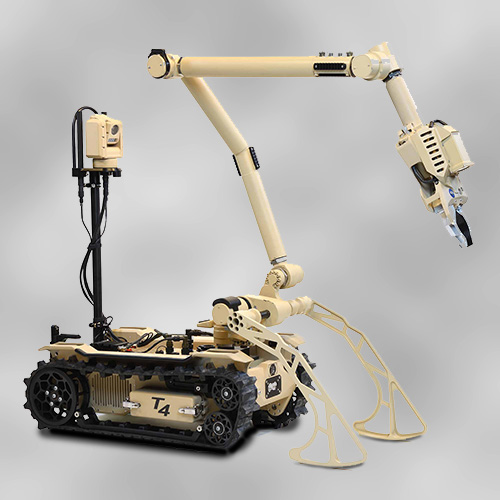
T4™ is a medium-sized explosive ordnance disposal robot built by L3Harris™ (www.l3harris.com/all-capabilities/t4tm-robotic-system). The manipulator arm is designed and built by HDT.
Mobile robots require rugged, lightweight, and strong manipulator arms. HDT’s arm for QinetiQ’s SPUR robot (shown below) weighs less than most laptop computers, but it is strong enough to reach up, grab a railing, and lift the entire robot off the ground. The arm is waterproof to IP67 and operates in temperatures as cold as well below freezing to as high as the noontime summer heat in the hottest deserts.

The modularity of HDT’s Adroit® manipulator system allows customers to configure arms to meet their exact requirements, including dual-arm systems with over a dozen joints. The dual-arm manipulator (shown below on QinetiQ’s Talon robot) is strong enough to lift and carry a 95th percentile adult male. It is dexterous enough to open the zipper on a soft bag and search the contents.

HDT’s arms have been mounted of dozens of different mobile robots, including legged robots (shown below on a GhostRobotics quadruped – www.ghostrobotics.io). Our arms are easy to integrate and can be controlled through standard protocols, such as the Robotic Operating System (ROS) and InterOperability Profile (IOP).

Highly dexterous dual arm mobile manipulator system, using HDT’s prosthetic arms.
HDT’s Adroit® robotic arm is capable of opening doors.